CMSC 20600: Introduction to Robotics
Spring 2024
The University of Chicago's CMSC 20600 Introduction to Robotics course gives students a hands-on introduction to robot programming covering topics including sensing in real-world environments, sensory-motor control, state estimation, localization, forward/inverse kinematics, vision, and reinforcement learning. This course is centered around 3 mini projects exploring central concepts to robot programming and 1 final project whose topic is chosen by the students. Each of these mini projects will involve students programming real, physical robots interacting with the real world. The use of physical robots and real-world environments is essential in order for students to 1) see the result of their programs ‘come to life’ in a physical environment and 2) gain experience facing and overcoming the challenges of programming robots (e.g., sensor noise, edge cases due to environment variability, physical constraints of the robot and environment).
Course Info
- Course Meetings:
- Regular Class Time: Tuesdays and Thursdays, 2:00pm - 3:20pm CST in JCL 011
-
Lab Time:
- Group A: Wednesdays, 3:00pm - 4:20pm CST in CSIL 5
- Group B: Wednesdays, 4:30pm - 5:50pm CST in CSIL 5
- Course Schedule: the schedule page includes webpages for each class meeting as well as deadlines for course deliverables
- Course Communication: all outside-of-class-meeting course communication will occur on the UChicago Spring 2024 Intro Robotics Slack channel
- Office hours:
- Mondays 1:30pm - 2:30pm CST in CSIL5 (Teddy)
- Thursdays 1:00pm - 2:00pm CST in CSIL5 (Timmy)
- Fridays 10:00am - 11:00am CST in CSIL5 (Sarah)
-
CSIL Hours:
- Monday - Friday: 10am - 10pm
- Saturday - Sunday: 12pm - 10pm
- CSIL5 Schedule: Please refer to the CSIL5 schedule to see when CSIL5 is in use or free. Even when other classes are going on, you can still access CSIL5 to use the robots and complete course-related work. However, we do ask that you minimize interruptions to other class activities happening in CSIL5.
Course Projects

The Warmup Project introduces students to robot programming in ROS (the Robot Operating System). This project serves as students' first application of processing sensor data, sending commands to the robot's motors, and implementing sensory-motor control. This project involves programming a robot to drive in a square, follow a person, and follow along a wall in an enclosed room.

The Particle Filter Localization project gives students the opportunity to implement a solution to the localization problem using a particle filter. This project is designed to give students the opportunity to learn about probabilistic approaches within robotics and to continue to grow their skills in robot programming.
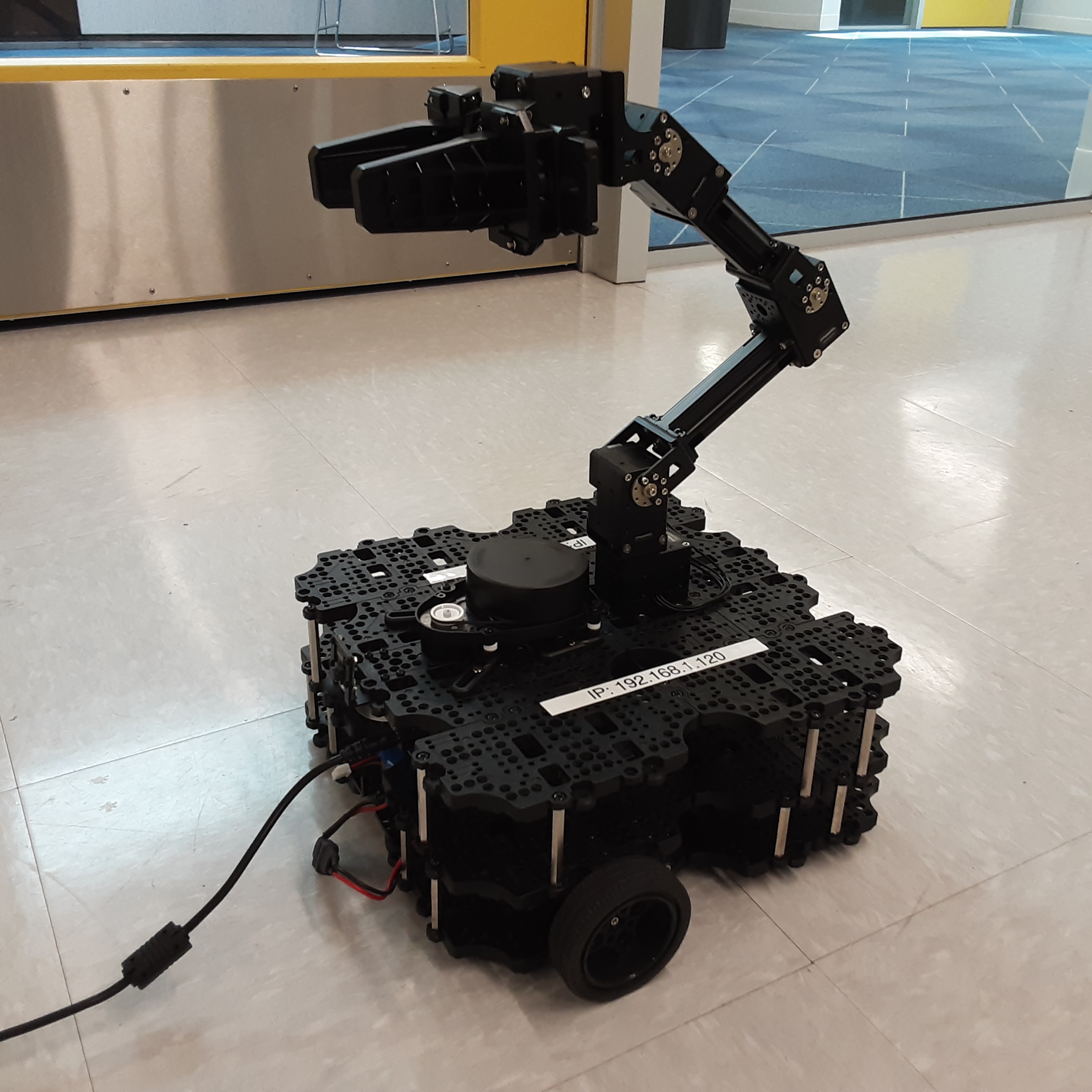
The Q-Learning project involves implementing a reinforcement learning algorithm (specifically Q-learning) to give your robot the ability to learn how to organize items in its environment. This project will also involves components of both 1) perception - detecting the items to organize and the locations for drop-off and 2) control - enabling the robot arm pick up the items and then navigate to the locations where they are to be dropped off.

The final project gives students the opportunity to explore a robotics topic in-depth of their own choosing. Students will see this project through from start (coming up with a good idea) to finish (implementing their idea on a real robot), exploring a robotics algorithm in greater depth than was covered in class. The example pictured on the left shows a student final project from Spring 2022: a robot that takes an image fed to it, uses computer vision to identify line segments within the image, and use its arm to draw this image on a wall.
Teaching Team

Sarah Sebo (she/her/hers)
sarahsebo@uchicago.edu
Tewodros (Teddy) Ayalew (he/him/his)
tewodrosayalew@uchicago.edu
Ting-Han (Timmy) Lin (he/him/his)
tinghan@uchicago.edu

Danny Lingen (he/him/his)
dlingen@uchicago.edu